- Home
- Leistungen
- Testen & Qualifizieren
- Entwicklung und Bau von Prüfsystemen
- Funktionsprüfstände
- Home
- Leistungen
- Testen & Qualifizieren
- Entwicklung und Bau von Prüfsystemen
- Funktionsprüfstände

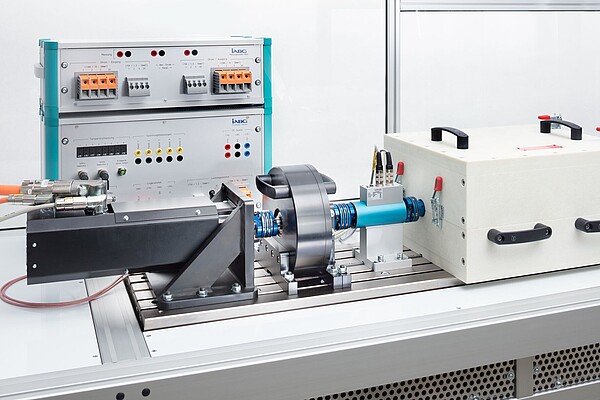
Wir planen und realisieren Ihren Funktionsprüfstand
Durch den Einsatz mechatronischer Systeme (z. B. elektromechanische Lenkungen, aktive Fahrdynamiksysteme) können Zielkonflikte in der Fahrzeugentwicklung und -abstimmung aufgelöst, neue Funktionalitäten ermöglicht oder weitere Freiheitsgrade für Optimierungen geschaffen werden. Die Entwicklungsaufwände und Innovationen verlagern sich hierbei von den mechanischen Baugruppen in die Elektronik und Software. Für die Entwicklung solcher Systeme werden daher Systemprüfstände benötigt, die eine Charakterisierung und Absicherung des mechatronischen Gesamtsystems (Mechanik, elektrischer Antrieb, Elektronik und Software) ermöglichen.


Kundenindividuell automatisiert
Prüfstände für mechatronische Systeme umfassen - neben mechanischen Belastungseinheiten - immer eine Möglichkeit zur Ansteuerung der Prüflinge über den Fahrzeugbus (z.B. CAN oder FlexRay) sowie über eine geeignete elektrische Leistungsversorgung für die zu testenden Systeme (Bordnetzsimulation). Zusätzlich werden häufig unterschiedliche Temperatur- und Klimabedingungen am Prüfling nachgebildet. Prinzipiell steigt der Testaufwand, je höher die zu erreichende Sicherheitsintegritätsstufe (ASIL-Level) gemäß ISO 26262 ist.
Eine geeignete Automatisierung der Funktions- und Entwicklungsprüfstände ist daher von zentraler Bedeutung für eine effiziente Entwicklung und Funktionsabsicherung mechatronischer Systeme. Dies betrifft sowohl die gemeinsame und synchrone Bedienung und Ansteuerung der einzelnen Teilsysteme des Prüfstandes und des Prüflings über eine übergeordnete Testautomatisierung als auch die Einbindung des Prüfstandes in bereits bestehende Prozesse und Werkzeugketten sowie die Automatisierung von Testprozeduren.
Geeignete Funktionsarchitekturen und Schnittstellen sowie Soft- und Hardwaremodule für Ihren konkreten Anwendungsfall stimmen wir mit Ihnen daher individuell ab.
Flexibel einsetzbar
Das typische Einsatzgebiet unserer Funktions- und Entwicklungsprüfstände erstreckt sich von entwicklungsbegleitenden Untersuchungen (z.B. Körperschallanalysen) über Performance-Tests (z.B. Bestimmung von Wirkungsgraden oder Reibungsprüfungen) bis hin zur automatisierten funktionalen Absicherung des Systems inkl. der Simulation elektrischer Fehler (z.B. Kurzschluss oder Busabriss).
Automatisierte Freigabeprüfungen von Softwareversionen, Driver-in-the-Loop-Untersuchungen, manöverbasiertes Testen und Dauerlauferprobungen sind weitere Einsatzgebiete unserer Hardware-in-the-Loop-Prüfstände. Unser Ziel ist es immer, gemeinsam mit Ihnen eine Lösung zu erarbeiten, die Ihnen größtmögliche Flexibilität bezüglich heutiger und zukünftiger Prüfaufgaben bietet.
Profitieren Sie von diesen Vorteilen unserer Funktionsprüfstände
Maßgeschneiderte Soft- und Hardwarelösungen
Wir bieten Ihnen maßgeschneiderte Soft- und Hardwarelösungen für Ihren Systemprüfstand - zugeschnitten auf Ihre individuelle Aufgabenstellung und Wünsche. Bei der Konzeptionierung geeigneter System- und Funktionsarchitekturen berücksichtigen wir neben Ihren Standards und Vorzugslisten und Betriebsmittelvorschriften selbstverständlich auch bei Ihnen bereits bestehende Automatisierungslösungen, Prozesse und Toolchains. Falls erforderlich implementieren wir individuelle Schnittstellen, z.B. zur Einbindung weiterer Peripheriegeräte, der Kommunikation mit übergeordneten Automatisierungssystemen oder für die Einbindung der Testumgebung in Ihre Datenbanksysteme.
Für Sie bedeutet das einheitliche, standardisierte Lösungen in Ihrem Prüffeld, kurze Einarbeitungszeiten, einen flexiblen Personaleinsatz und größtmögliche Flexibilität hinsichtlich heutiger und zukünftiger Prüfaufgaben.
Passgenaue Aktuatorik und Regelungstechnik
Mechatronische Systeme werden in der Regel anhand sehr unterschiedlicher Lastfälle charakterisiert, die sich von Tests im blockierten Zustand über sehr langsame Bewegungen mit konstanter Geschwindigkeit (z.B. zur Reibkraftmessung), Nachfahrsignalen aus Fahrbetriebsmessungen bis hin zu hochdynamischen Tests (z.B. Ermittlung von Sprungantworten zur Reglerabstimmung) erstrecken. Während die meisten Tests mit aktivem, geregeltem Prüfling erfolgen, werden einige dieser Tests (z.B. Ermittlung der Reibkräfte oder Bestimmung der dynamischen Steifigkeit) auch am passiven Prüfling durchgeführt. Zu den hieraus resultierenden Zielkonflikten kommt erschwerend hinzu, dass in der Regel Prüflinge mit sehr unterschiedlichen mechanischen Eigenschaften zu charakterisieren sind. Beispiele hierfür sind Bauteilsteifigkeiten, Übersetzungen, unterschiedlichste Geometrien und verschiedenste Einbaulagen. Aus den unterschiedlichen Lastfällen und den stark variierenden Eigenschaften der Prüflinge resultieren stark unterschiedliche Anforderungen an die Aktuatorik und die Regelung des Prüfstandes.
Im Fall aktiver Prüflinge stellen die Wechselwirkungen zwischen der Regelung des Prüfstandes und den Regelkreisen der Prüflinge eine weitere Herausforderung dar. Auch hierbei ist zu berücksichtigen, dass das dynamische Verhalten der Prüflinge in Abhängigkeit der Betriebsmodi und des aufgespielten Softwarestandes stark variieren kann. Iterative Ansätze, die an Prüfständen für konventionelle, passive Prüflinge zur Verbesserung der Regelgüte eingesetzt werden, sind für die Funktionserprobung elektromechanischer Systeme auch aufgrund des stark zeitvarianten Verhaltens der aktiven Prüflinge häufig ungeeignet.
Die Aktuatorik und Regelungsalgorithmen Ihres neuen HiL-Prüfstandes legen wir daher modellbasiert auf Ihre spezifischen Bedarfe aus. Bei moderaten Anforderungen an die Dynamik verwenden wir vorwiegend Servomotoren mit Kugelgewindetrieb oder energieeffiziente hydrostatische Antriebe. Bei höheren Anforderungen kommen vorwiegend elektrische Direktantriebe zum Einsatz. Letztere bieten insbesondere im Hinblick auf Performance, Energieverbrauch, Betriebs- und Wartungskosten, die Umsetzung von sicheren Betriebszuständen (beispielsweise zum Rüsten) sowie die benötigte Infrastruktur signifikante Vorteile gegenüber servohydraulischen Antrieben.
Zuverlässige Testergebnisse im gesamten Einsatzspektrum
Funktionsprüfstände müssen selbstverständlich deutlich performanter als die Prüflinge sein. Hieraus resultieren hohe Anforderungen an die Dynamik, die Messgenauheit, die Steifigkeit und das strukturdynamische Verhalten. Die Auslegung steifer Strukturen wird hierbei häufig durch große Rüst- und Verstellbereiche erschwert. Diese sind erforderlich, um eine große Variantenvielfalt an Geometrien und Einbaulagen der Prüflinge zu ermöglichen.
Mit unserer Expertise legen wir Ihren Systemprüfstand unter Verwendung verschiedener numerischer Werkzeuge passgenau für Ihre individuellen Anforderungen aus. Mögliche Zielkonflikte zeigen wir auf, diskutieren diese mit Ihnen und schlagen Ihnen passende Lösungen vor.
Das Ergebnis: Ein Prüfsystem, das Ihre individuellen Anforderungen erfüllt und Testergebnisse liefert, auf die Sie sich verlassen können.
Variabilität und Erweiterungsfähigkeit
Neue Entwicklungsvorhaben machen häufig auch die Beschaffung neuer Prüfsysteme erforderlich. Da die Konzeptionierung und Auslegung der Prüfsysteme in der Regel bereits in frühen Entwicklungsphasen des späteren Prüflings beginnen, sind die Anforderungen an die Funktionsprüfstände zu Beginn der Prüfstandsentwicklung oft noch unklar oder ändern sich im Laufe des Projektes. Erschwerend kommt hinzu, dass aufgrund der hohen Investitionen ausreichende Leistungsreserven für zukünftige Produktgenerationen mit noch unbekannten Eigenschaften vorgehalten werden müssen.
Dies gelingt in einer partnerschaftlichen Zusammenarbeit in den Projekten und durch ein professionelles Anforderungsmanagement. Unser Ziel ist es, gemeinsam mit Ihnen die optimale Lösung für Ihre Aufgabenstellung zu erarbeiten, Eventualitäten zu berücksichtigen und Erweiterungsmöglichkeiten vorzusehen.
Für Sie bedeutet das Investitionssicherheit.
Einfache und sichere Bedienung
Die Testautomatisierung Ihres Prüfstandes setzen wir gemäß Ihrer konkreten Bedarfe um. Hierfür erforderliche Benutzeroberflächen entwickeln wir im Projekt gemeinsam mit Ihnen. Die späteren Anwender sowie die Erfahrung bei Ihnen im Haus beziehen wir selbstverständlich mit ein. Mit dem Ziel, ein einfaches, schnelles, sicheres und ergonomisches Rüsten zu ermöglichen, entwickeln wir geeignete Rüstkonzepte - ebenfalls gemeinsam mit Ihnen bzw. den späteren Bedienern. Das Sicherheitskonzept des Prüfstandes stimmen wir frühzeitig mit den Anwendern und Ihrer Arbeitssicherheit ab. Soweit möglich, setzen wir Aktorik mit bewährten und einfach umzusetzenden Sicherheitsfunktionen ein.
Das Ergebnis sind Prüfstände, die einfach und sicher zu bedienen sind.
Whitepaper
Testrig - Fachtagung für Prüfstandsbau und Prüfstandsbetrieb (2022)

Entwicklung von Funktionsprüfständen für aktive Fahrdynamiksysteme: Herausforderungen und Lösungen
DownloadNachdem Sie das Formular gesendet haben, erhalten Sie eine E-Mail, um Ihre E-Mail-Adresse zu verifizieren.
Nach Ihrer Bestätigung erhalten Sie eine zweite E-Mail mit dem Link zum gewünschten Dokument.
Bitte vollständig ausfüllen
Wie können wir Ihnen helfen?
Bitte füllen Sie das Formular aus, wir setzen uns umgehend mit Ihnen in Verbindung.