Automated Valet Parking
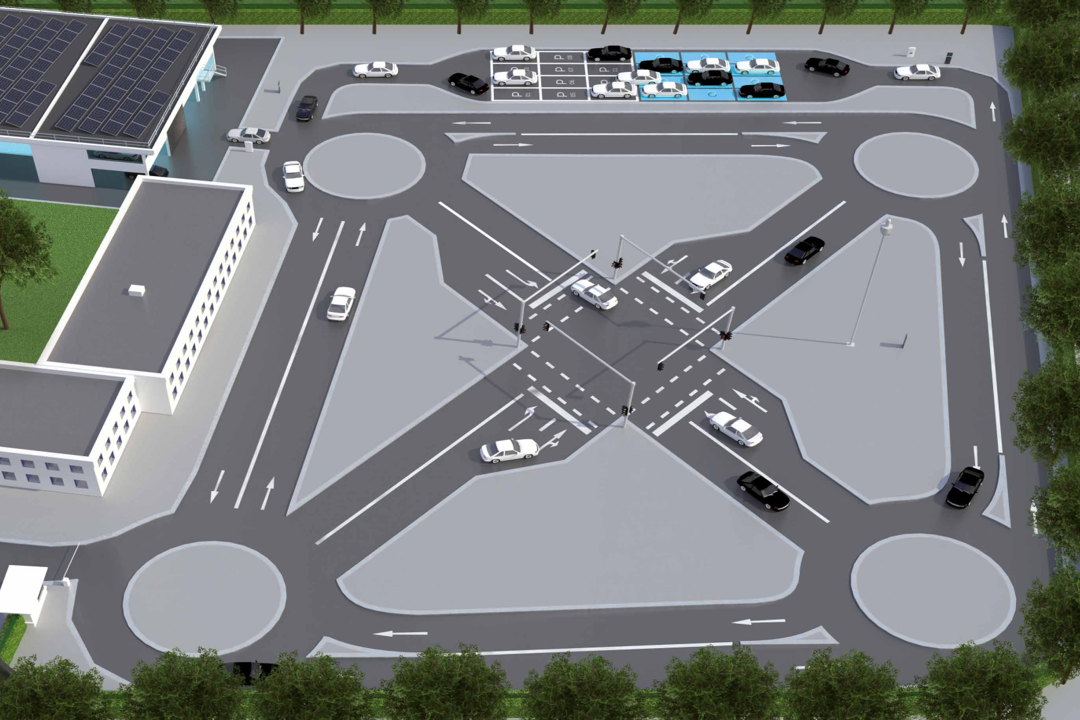
„Mobility as a Service“ bedeutet Vollautomatisierung – der Mensch ist in dieser hohen Ausbaustufe an vielen Fahrmanövern nicht mehr aktiv beteiligt. Ein Beispiel ist der fahrerlose Parkservice (SAE Level 4), der zum Beispiel an Flughäfen angeboten werden kann. Dieser fahrerlose Parkservice soll auf dem Testfeld in einem Parkhaus-Labor verifiziert und später auch zertifiziert werden. Getestet wird zunächst die Vorstufe des automatischen Valet-Parking: das Einparken per Smartphone. Hier bleibt der Fahrer in der Nähe seines Fahrzeugs und überwacht den Einparkvorgang mittels einer App auf seinem Smartphone. Da in dem menschenleeren Parkhaus keine Verbindung mit Ladekabeln hergestellt werden kann, werden die Fahrzeuge dort automatisch induktiv geladen.