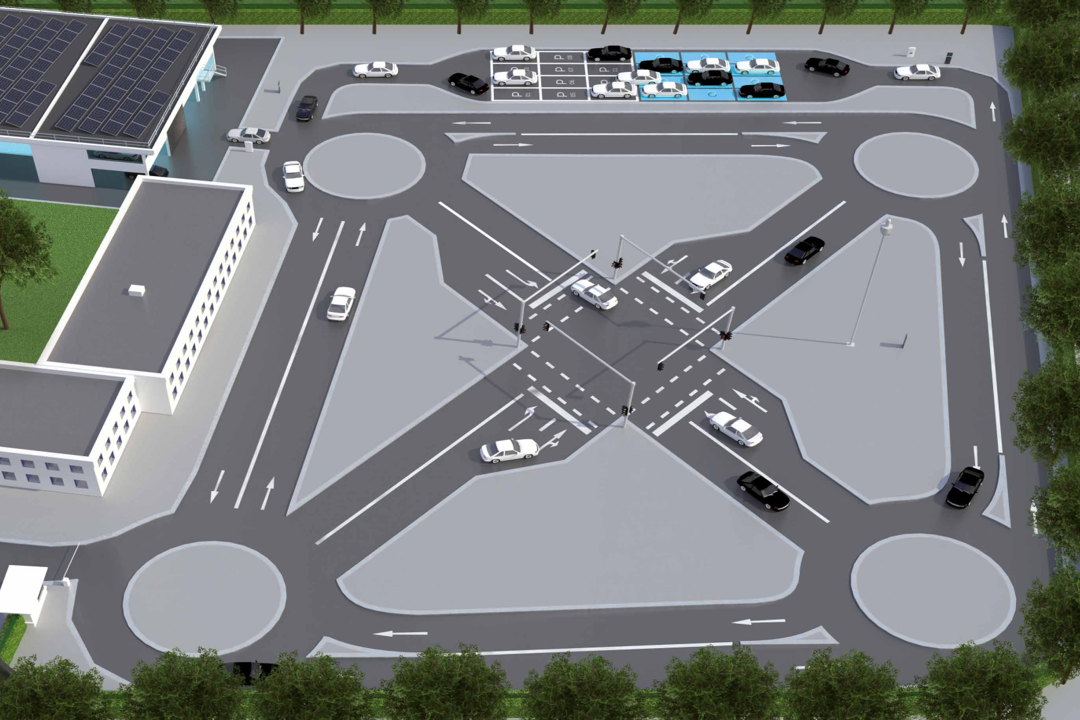
Automated Valet Parking
"Mobility as a Service" means full automation – in this advanced stage, humans are no longer actively involved in many driving maneuvers. One example is the driverless parking service (SAE Level 4), which can be offered at locations such as airports. This driverless parking service will be verified in the test field's parking garage lab and later certified. Initially, the precursor to automatic valet parking will be tested: parking via smartphone. Here, the driver remains near the vehicle and monitors the parking process using an app on their smartphone. Since no cables can be connected in the unmanned parking garage, the vehicles are automatically charged inductively.